The waters of the Sound are dense, cold and often filled with both organic and inorganic matter that reduces the visibility to a few inches in some locations. On a good day, light may only penetrate a few feet below the surface rendering most optical technologies ineffective to study the larger scale features of the seafloor. Sound waves produced by acoustic technologies, however, are able to pierce the cloudy waters to a much greater degree making them the de facto tools to acquire a variety of data – from large scale maps to fine scale measurements of ocean currents. The following summarizes the acoustic technologies used by the LIS mapping teams.
Seafloor Mapping Sonars
Multibeam Sonars– As the name implies, these sonar systems produce multiple beams (up to 150) of sound that are emitted from a sound projector installed into the hull of a vessel or mounted on a pole attached to the ship. The frequency of the sound produced determines the depth of water that can be measured, with lower frequencies (e.g. 12 KHz) able to penetrate full ocean depths, while higher frequencies (e.g. 250 KHz) provide greater resolution but are depth limited (i.e. 100 meters). The sound beams travel to the seafloor and are reflected back to a receiver that records the time and strength of the returning signal. The speed of sound in the local waters is periodically measured, knowing this the depth can be calculated (depth = ½ x speed of sound x time). The strength of the returning sound is determined by the nature of the seafloor, with soft mud absorbing much of the sound and harder gravel or rock bottoms reflecting much of the sound. In this fashion the signal strength becomes a proxy of the type of bottom being mapped, with convention being that the stronger signals display lighter tones while weaker signals display darker on the backscatter maps. L-3 Communications SeaBeam Instruments has developed a detailed description of the theory of operation of multibeam sonars that can be found here. Multibeam Sonar Theory of Operation. L-3 Communications SeaBeam Instruments. 2003.

Phase Differencing Bathymetric Sonars (PDBS)– These systems work on the same principle as multibeam sonars in that they measure the depth using the travel time of sound. They differ in their configuration in that instead of producing multiple beams of sound the sonar is comprised of two side-looking transducers that each has one transmit element (stave) and multiple (eg four) receive elements. Similar to the multibeam systems the PDBS record both the sound travel time and strength to produce a side scan image of the seafloor. The PDBS side looking arrays have a 240 degree view angle allowing them to survey a very wide swath, up to 12 times the depth of the water. A description of the PDBS technology has been developed by Kongsberg’s Geoswath Plus, the used by the LIS mapping team that can be found here.
Sub-bottom Profiler
Sound is not only easily transmitted through water, at low frequencies (i.e. 2-24 KHz) it can also penetrate into the seafloor. The sound is reflected as it encounters features beneath the surface, providing an image of the layers that comprise the seafloor. Similar to the surface mapping sonars, harder layers return a stronger signal, while the sound penetrates further in softer bottoms. This technology is critical to measuring the sedimentary environments found in Long Island Sound and provides an historical record of the physical processes affecting the seafloor. Areas impacted by strong currents will feature harder, more reflective bottoms, while areas with lesser currents will be characterized by softer, muddier sediments that settle and are deposited on the seafloor. More detailed description of sub-bottom systems can be found here.

Acoustic Doppler Current Profilers (ADCP’s)
Scientists have recognized the ability of sound to pass through water and be reflected by various surfaces – this includes tiny particles suspended in the water. They also recognized another property of sound known as the Doppler Effect that occurs when sound reflects off from a moving object – raising the frequency of the reflected sound when the object is headed towards the listener/sensor and lowering as the object moves away. This phenomenon is perhaps best exemplified by the sound of an approaching train or vehicle. This change in frequency, or Doppler Shift, forms the basis for the functioning of an Acoustic Doppler Current Profiler (ADCP), a device used to measure ocean currents. The ADCP sends out acoustic pings at a regular rate at a certain frequency and when the sound reflects from particles moving over the device it undergoes a frequency shift depending upon the direction the particle is heading. The ADCP measures this frequency change to determine how fast the particles are moving. The unit also measures the time for the returned signal, which indicates how far the particle is from the sensor and therefore allows for measurements throughout the water column, hence the term profiler. A detailed description of an ADCP with additional references can be found here.
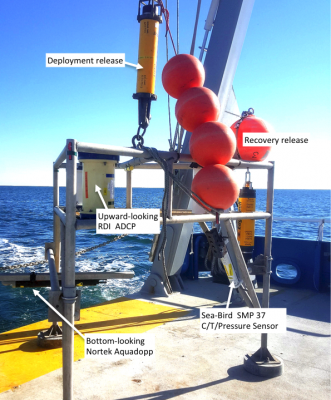
The seafloor observation frame that supports several sensors to measure physical oceanographic conditions, including two ADCP’s – the upward looking RDI unit to measure the currents above the frame and the down-looking Nortek Aquadopp that provides very fine measurement of the current directly over the seafloor.
References
L-3 Communications SeaBeam Instruments. 2003.Multibeam Theory of Operation. East Walpole, MA